
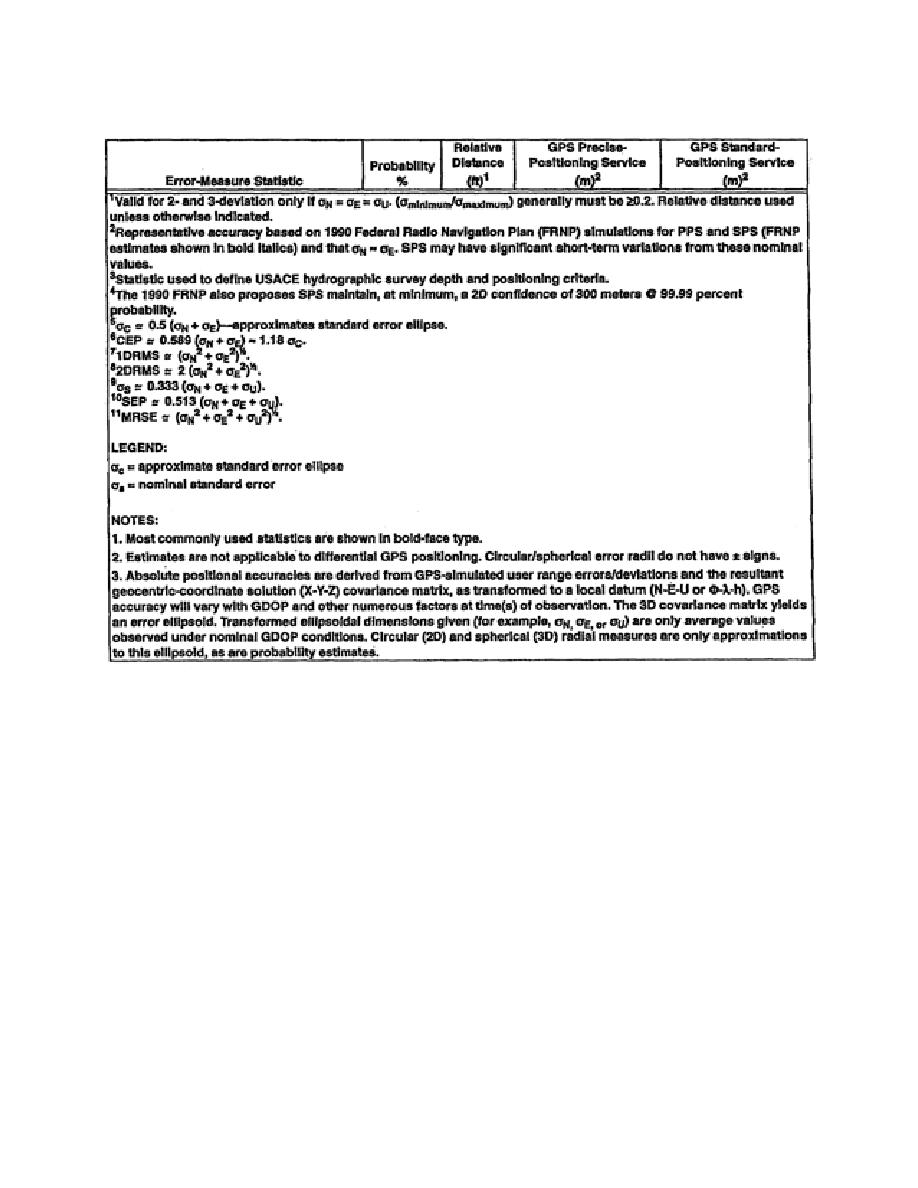
Table 5-1. Representative GPS Error-Measurement Statistics for Absolute Point Positioning
(continued)
PART C - DIFFERENTIAL PRECISE POSITIONING
5-19. Reducing Errors. Absolute positioning, as discussed earlier, will not provide the accuracies
needed for most survey control projects due to existing and induced errors. To eliminate errors and
obtain higher accuracies, use GPS in a differential-positioning mode. The terms relative and differential
have similar meanings. Relative is used when discussing one thing in relation to another. Differential is
used when discussing the technique of positioning one thing in relation to another. Differential
positioning requires that at least two receivers be set up at two stations (usually one is known) to collect
satellite data simultaneously to determine coordinate differences. This method positions the two stations
relative to each other (hence the term relative positioning) and can provide the accuracy required for
basic land surveying.
5-20. Code Pseudorange Tracking. Differential positioning (using code pseudorange) is performed
similarly to code-pseudorange tracking for absolute positioning. Some of the major uncertainties are
effectively eliminated or minimized. This process results in absolute coordinates of the user on the
earth's surface. Errors
EN0593
5-10

 Previous Page
Previous Page
